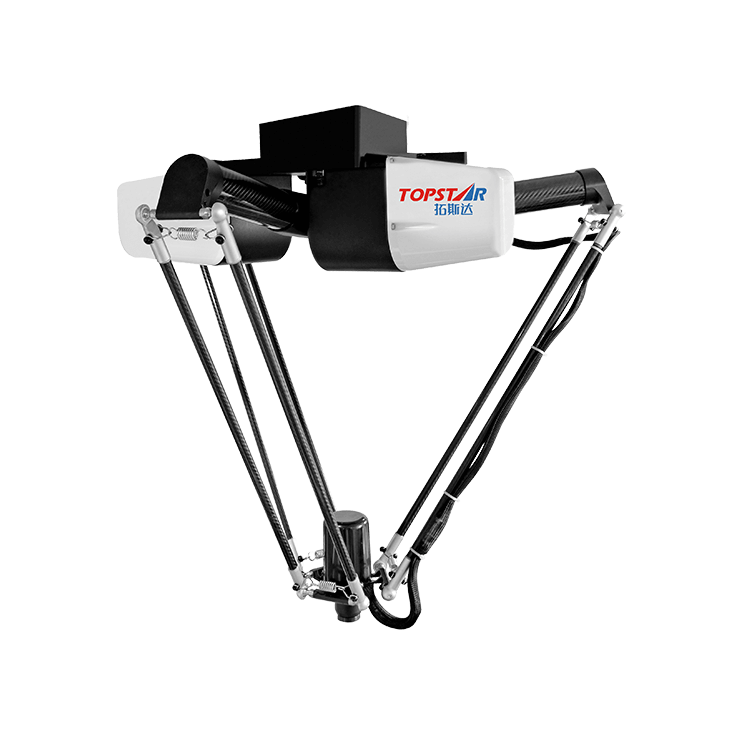
Parallel Multi-Joint Robot
It realizes the fast following, grabbing and placing of the conveyor belt, which is widely used in food, automobile and other industries; it has the characteristics of large load, fast speed and stable structure.
Characteristics
- 1. High cycle time: Continuous cycle time 0.34s, repeat positioning accuracy ±0.1mm, innovative parallel robot configuration, optimized and upgraded on the basis of three-dimensional space XYZ translation and rotation around the Z axis.
- 2. High flexibility: Lightweight design, easy to install and use, matched self-developed controller custom development function, with quick change function, can realize the rapid change of production lines.
- 3. High stability: Carbon fiber raw materials are matched with unique joint design and end motor configuration to achieve high performance of each key module and prolong service life.
- 4. Simple and easy to use: With plane equipment dedicated industry process package of multi-machine coordination, palletizing process, visual process and tracking process.
Application Industries
- Medical, Food, 3C, Daily Chemicals, Hardware Sorting.
Adequate supply of goods, available for delivery within 35 days.
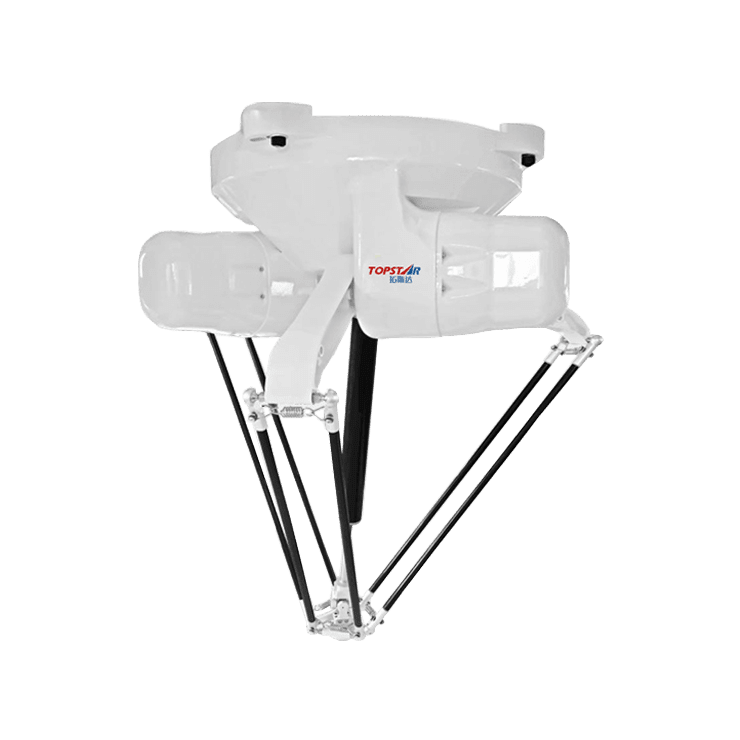
Model Display